4 仿真研究
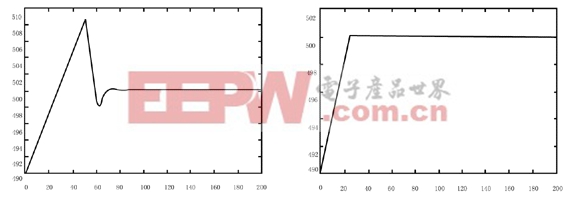
圖4-1 回路2的PID控制 圖4-2 回路2的ANN-PID復(fù)合控制
 !
!
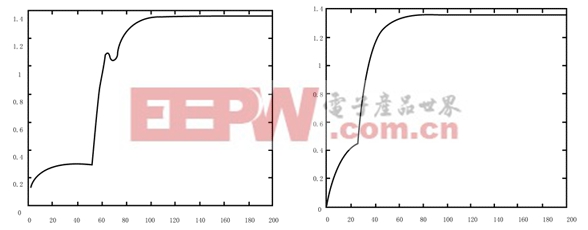
圖4-3 回路1的PID控制 圖4-4 回路1的ANN-PID復(fù)合控制
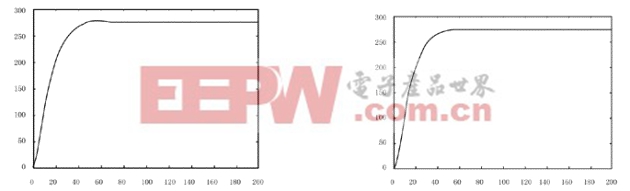
圖4-5 回路3的PID控制 圖4-6 回路3的ANN-PID復(fù)合控制
由仿真結(jié)果可以看出,單獨(dú)使用PID控制時回路間的耦合作用使動態(tài)響應(yīng)曲線有超調(diào)和多個極點(diǎn)導(dǎo)致了快速性�、穩(wěn)定性較差���;ANN-PID復(fù)合控制則表現(xiàn)出良好的解耦控制效果�����,三個控制回路的動態(tài)性能都有顯著改善。






評論